TRANSFORMER BASICS
Theory, Operation and Performance.
1. Introduction to Transformers
Transformers are critical components in modern electrical and electronic systems.
They provide vital electrical isolation and enable voltage transformation for various applications.
Even though the design process can sometimes be viewed as an “art” , their construction and functionality are based on fundamental physics principles.
This article introduces the foundational theory, operation, and performance of transformers, offering insights into key characteristics and practical design considerations and how Voltech’s AT5600 wound component tester optimizes modern transformer testing.
2. Basic Transformer Theory
Transformers play a pivotal role in maintaining electrical isolation between circuits, essential for both safety and functionality.
A transformer consists of a magnetic core with primary and secondary coils wound around it.
When an alternating voltage is applied to the primary coil, it will generate an alternating current that corresponds to alternating magnetic flux in the core.
This flux induces a voltage in both secondary and primary coil thus; Faraday’s Law of Induction in action.
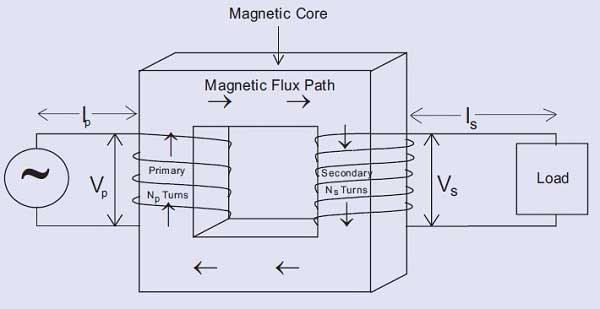
The above figure represents the essential elements for a transformer: a magnetic core with a primary and secondary coil wound on the limbs of the magnetic core.
An alternating voltage (Vp) applied to the primary creates an alternating current (Ip) through the primary.
This current produces an alternating magnetic flux in the magnetic core.
This alternating magnetic flux induces a voltage in each turn of the primary and in each turn of the secondary.
As the flux is a constant, i.e. the same in both primary and secondary:
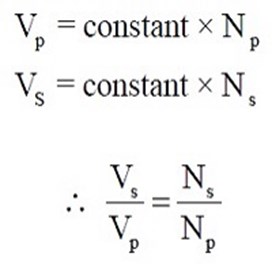
This equation shows that a transformer can be used to step up or step down an ac voltage by controlling the ratio of primary to secondary turns. (Voltage transformer action).
It can also be shown that:
Primary Volt Amperes = Secondary Volt Amperes
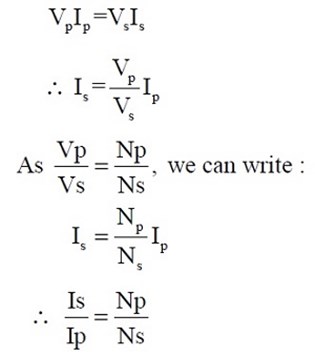
This equation shows that a transformer can be used to step up or step down an ac current by controlling the ratio of primary to secondary turns.
(Current transformer action)
It will be noted that there is no electrical connection between the primary and secondary windings.
Transformers thus enable:
- Voltage Transformation: Step up or step down AC voltage.
- Current Transformation: Step up or step down AC current.
- Electrical Isolation: Provide isolation without direct electrical connection between primary and secondary windings.
These characteristics make transformers indispensable in most electrical and electronic devices.
3. B-H Curves
The core material’s magnetic properties are critical for transformer performance.
When the primary coil is energized, the magnetizing current creates a magnetizing force (H), which generates magnetic flux (B) in the core. This relationship between the B and H is represented by the B-H curve of the material.
The magnetizing force (H) is equal to the product of magnetizing current and the number of turns, and is expressed as Ampere - Turns.
B-H curves illustrate the flux density as the function of the magnetizing force, it means that as the (H) Increases, (B) rises until the core material is saturated.
At saturation, further increases in (H) do not significantly increase (B) and the reason why designing transformers to operate below the saturation point is crucial to ensure efficient performance.
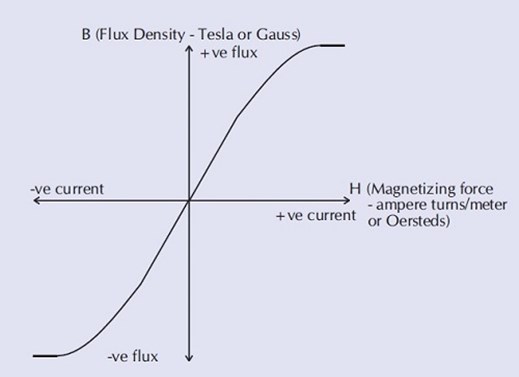
From the B-H curve it can be seen that, as the magnetizing force is increased from zero, the flux increases up to a certain maximum value of flux.
Above this level, further increases in magnetizing force result in no significant increase in flux. The magnetic material is said to be 'saturated'.
A transformer is normally designed to ensure that the magnetic flux density is below the level that would cause saturation.
The flux density can be determined using the following equation:
Where:
E represents the RMS value of the applied voltage.
N represents the number of turns of the winding.
B represents the maximum value of the magnetic flux density in the core (Tesla).
A represents the cross-sectional area of the magnetic material in the core (sq. meters).
f represents the frequency of the applied volts.
Note
1 Tesla = 1 Weber/meter²
1 Weber/m² = 10,000 Gauss
1 Ampere-turn per meter = 4 p x 10-3 Oersted
In practice, all magnetic materials, once magnetized, retain some of their magnetization even when the magnetizing force is reduced to zero.
This effect is known as 'remanence' and results in the B-H curve for the material exhibiting a response to a decreasing magnetizing force that is different to the response to an increasing magnetizing force.
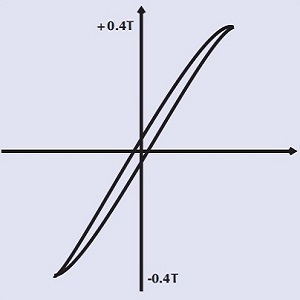
In practice real magnetic materials have a B-H curve as follows:
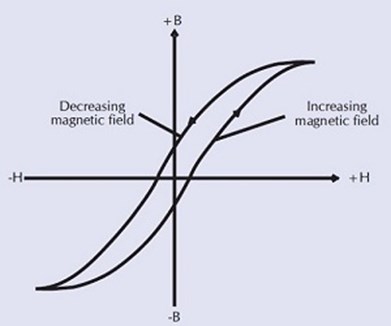
The curve shown above is termed the 'hysteresis' loop of the material, and it represents the true B-H response of the material. (The first B-H curve represented the average or mean of the true B-H loop response).
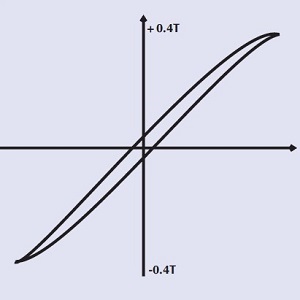
The slope of the B-H curve, the saturation level, and the size of the hysteresis loop are dependent on the type of material used, and on other factors.
This is illustrated using the following examples:
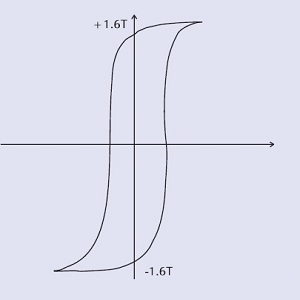 |
Low-grade iron core High-saturation flux density Large loop = large hysteresis loss Suitable for 50/60Hz |
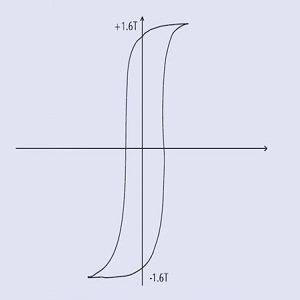 |
High-grade iron core High-saturation flux density Medium loop = medium hysteresis loss Suitable for 400 Hz transformers |
 |
Ferrite core - no air gap Medium-saturation flux density Small loop = small hysteresis loss Suitable for-high frequency transformers |
 |
Ferrite core - large air gap Small loop = small hysteresis loss Suitable for high-frequency Inductors with large DC current |
4. Hysteresis Loss in Transformers
The B-H curve exhibits a phenomenon called hysteresis.
This is a phenomenon where the magnetization of the core material lags behind the magnetizing force – the energy losses resulting from this event is known as the hysteresis loss.
Materials with larger hysteresis loops incur higher losses.
This loss is represented by the area enclosed within the B-H hysteresis loop.
Therefore, transformer cores are designed with materials that have low hysteresis loss to enhance efficiency.
5. Eddy Current Losses in Transformers
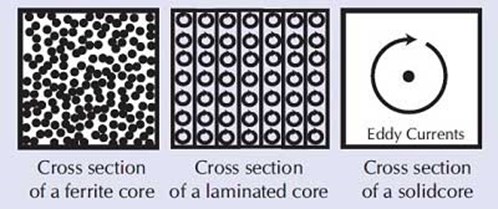
Eddy currents (also called Foucault's current) are loops of electrical current induced within the core material by the alternating magnetic flux.
The currents create resistive loss which leads to heating of the core known as Eddy Current Loss as they look like eddies or whirlpools.
To minimize the losses, transformer cores are made from laminated sheets or ferrite materials, which restrict the paths for these currents.
6. Transformer Equivalent Circuit
An ideal transformer with one primary winding and two secondary windings can be represented as shown below:
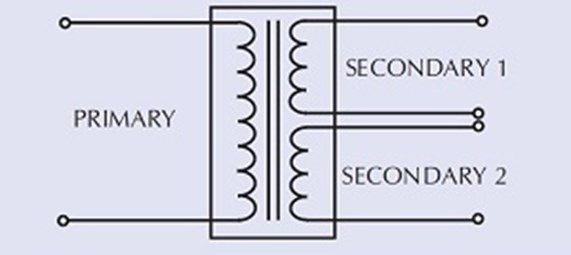
Such a transformer has the following characteristics:
-
- No losses
- Perfect coupling between all windings
- Infinite open circuit impedance (i.e., no input current when secondaries are open-circuited).
- Infinite insulation between windings
In practice, transformers differ from the ideal model due to various non-ideal characteristics. The transformer equivalent circuits incorporate these aspects:
-
- Winding Resistances
- Capacitances
- Core Losses
- Magnetizing Inductance
- Leakage Inductances
These variables aid in forecasting transformer performance and deviations from the ideal model.
Many of these characteristics can be represented by a transformer equivalent circuit:
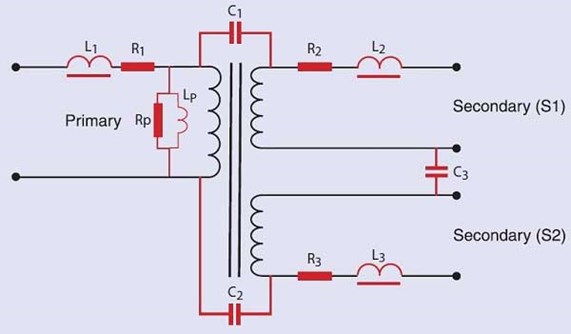
Where:
R1, R2, R3 represent the resistance of the winding wire.
C1, C2, C3 represent the capacitance between the windings.
Rp represents the losses which are due to the eddy current and hysteresis losses. These are the real power losses, sometimes called the core loss, that may be measured by performing an open-circuit power measurement. Because there is no load current, there is very little I2R copper loss in the energized winding, and the watts measured at no load are nearly all due to the core.
Lp represents the impedance due to the magnetizing current. This is the current that generates the magnetizing force, H, used in the B-H loop diagrams. Note that this current may not be a simple sine wave, but can have a distorted, peaked shape, if the transformer is operated in the non-linear region of the B-H curve. This is usually the case for line-frequency, laminate type transformers.
L1, L2, L3 represent the leakage inductance of each of the windings. (This is discussed in detail "Measuring Leakage Inductance".)
7. Conclusion
Understanding a transformer's equivalent circuit provides valuable insights into its real-world performance, including how various factors affect efficiency. Knowledge of transformer theory, operation, and practical considerations is essential for engineers to design and test transformers effectively across diverse applications.
Optimize Transformer Testing with Voltech AT5600
For practical applications and transformer testing, the Voltech AT5600 Transformer Tester is an advanced tool that simplifies and enhances the testing process for basic transformer parameters and performance.
The AT5600 provides highly accurate measurements of winding resistance, leakage inductance, and other key parameters, aligning with industry standards to ensure transformer quality.
Incorporating the Voltech AT5600 in transformer testing workflows equips engineers to quickly diagnose and optimize transformers for quality control, manufacturing, and design improvement.
With the Voltech AT5600, you can trust in the consistent quality of your transformers, positioning your products for success across diverse applications in the electrical and electronics industries.